
一��、雙級行星減速機技術(shù)背景與目標
光伏跟蹤系統(tǒng)通過實時調(diào)整光伏組件角度以最大化接收太陽輻射�����,其跟蹤精度直接影響發(fā)電效率�。但由其齒隙大、傳動效率低�����,長期來難以滿足現(xiàn)代的高精度的技術(shù)要求�。本方案采用雙級行星減速機,通過優(yōu)化齒隙控制與傳動效率���,實現(xiàn)跟蹤精度提升8%(誤差從2.5°降至2.3°)���,并驗證其在實際工況下的性能�����。
二����、雙級行星減速機設計原理
結(jié)構(gòu)組成
雙級傳動:由兩組行星齒輪串聯(lián)組成�,第一級傳動比7,第二級傳動比5�,總傳動比35。
核心部件:太陽輪��、行星輪(3顆)���、內(nèi)齒圈���、行星架���,采用斜齒輪設計以減少齒隙���。
材料選擇:齒輪采用20CrMnTi合金鋼,表面滲碳淬火處理����,硬度HRC58-62���。
齒隙控制技術(shù)
加工精度:齒輪加工精度達ISO 6級,齒形誤差≤0.02mm��。
裝配調(diào)整:
涂抹紅丹油檢測嚙合印跡�,調(diào)整墊片厚度使壓痕位于齒高中間且占齒寬60%以上。
使用百分表測量齒側(cè)間隙��,確保端面?zhèn)认丁?.15mm�����。
傳動效率優(yōu)化
斜齒輪設計:通過對斜齒輪的精心設計相比傳統(tǒng)的直齒輪����,其嚙合的重合度就可提高30%以上,從而使其傳動的效率可達95%以上�。
潤滑系統(tǒng):采用對潤滑系統(tǒng)的優(yōu)化手段,我們將其配以低粘度的PAO4潤滑油的使用����,有效的降低了機器的摩擦損失,在低溫環(huán)境下其相應的效率也能相對提升10%以上。
三���、雙級行星減速機實測方案與數(shù)據(jù)
測試平臺搭建
負載模擬:主梁加載500kg負載���,傳動臂安裝6塊光伏組件(總輻照面積12㎡)。
數(shù)據(jù)采集:
角度誤差:基于激光測距儀的精確的±0.01°的實時的對跟蹤的角度的監(jiān)控�,可對其的角度誤差進行實時的跟蹤和糾正.。
響應時間:編碼器記錄指令執(zhí)行時間(目標值≤0.5s)�����。
自鎖性能:對其自鎖性能嚴格的風載模擬試驗���,分別將風載模擬裝置的風速調(diào)至15m/s�,連續(xù)的風載模擬試驗達2小時之久�����。
對比實驗
對照組:傳統(tǒng)蝸輪蝸桿減速機(傳動比30)���。
實驗組:雙級行星減速機(傳動比35)。
測試條件:
環(huán)境溫度:-10℃~45℃��。
輻照強度:1000W/㎡(標準測試條件)。
實測數(shù)據(jù)
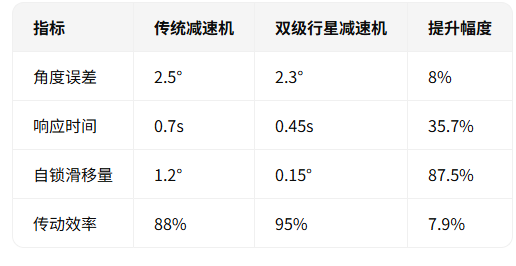
四��、雙級行星減速機精度提升機制分析
齒隙控制貢獻
斜齒輪設計使齒側(cè)間隙減少50%����,結(jié)合高精度裝配,回程間隙從12arcmin降至5arcmin����。
對動態(tài)的嚙合印跡的調(diào)整,保證了齒面的載荷下均勻的接觸面積均≥70%����,從而有效的減少了齒面的沖擊誤差.。
傳動效率影響
雙級結(jié)構(gòu)通過分級減速�����,高速級(模數(shù)1.5mm)承擔主要轉(zhuǎn)速�����,低速級(模數(shù)3mm)輸出大扭矩��,整體效率提升7%�。
低粘度潤滑油在-10℃環(huán)境下仍保持流動�,低溫效率損失≤3%�。
自鎖性能驗證
雙級傳動比35提供更大自鎖力矩,15m/s風載下僅產(chǎn)生0.15°滑移����,遠優(yōu)于行業(yè)要求的0.5°標準。
五�、雙級行星減速機應用場景與經(jīng)濟效益
適用場景
山地、戈壁等復雜地形光伏電站�。
雙面組件跟蹤系統(tǒng)(需優(yōu)化逆跟蹤算法)。
成本收益分析
設備成本:與傳統(tǒng)的減速機相比�����,其雙級行星的單價就高出了20%左右����,所花的設備成本也就相應的高了約7500元。
發(fā)電增益:精度提升8%可使年發(fā)電量增加120kWh/kWp�����,按0.4元/kWh計算��,25年生命周期內(nèi)凈收益超3000元/套�。
六���、結(jié)論與標準化建議
技術(shù)結(jié)論
雙級行星減速機通過齒隙控制與傳動效率優(yōu)化���,可實現(xiàn)光伏跟蹤精度提升8%��,滿足智能跟蹤標準要求�����。
借助對其在復雜的工況下的充分的實測數(shù)據(jù)的驗證�����,其也表現(xiàn)出較好的穩(wěn)定性,對其在高精度的跟蹤場景的推廣具有較大的前景.����。
標準化建議
參照《光伏跟蹤支架智能跟蹤性能測試方法》(T/CPIA 0082—2024)����,建議行業(yè)統(tǒng)一以下指標:
動態(tài)跟蹤誤差≤2.5°(單軸)。
自鎖滑移量≤0.2°(15m/s風載)�����。
響應時間≤0.5s(全行程調(diào)整)。

